Programmed Puppet
by Anirudh
For my resistive sensor project I hand sewed a puppet that contains a velostat bend sensor in its mouth and links to the LilyPad Arduino board, so that when it opens and closes its mouth it controls the pattern in which 3 LED lights light up on its body. My puppet also has hair on its head made of both conductive and resistive thread which acts as a stroke sensor and lights up an additional LED light when stroked.
I experimented a lot with several different projects before settling on this one and learned quite a bit during the process. One thing I learned was the need for a good plan for the circuitry so that it would be organized and not messy when making the paths to the LilyPad.
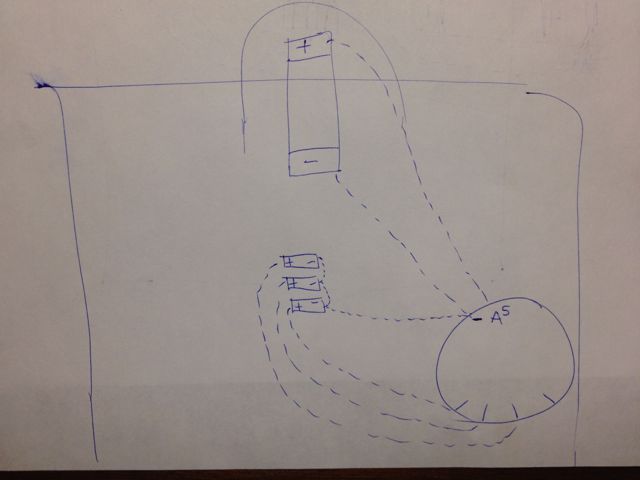
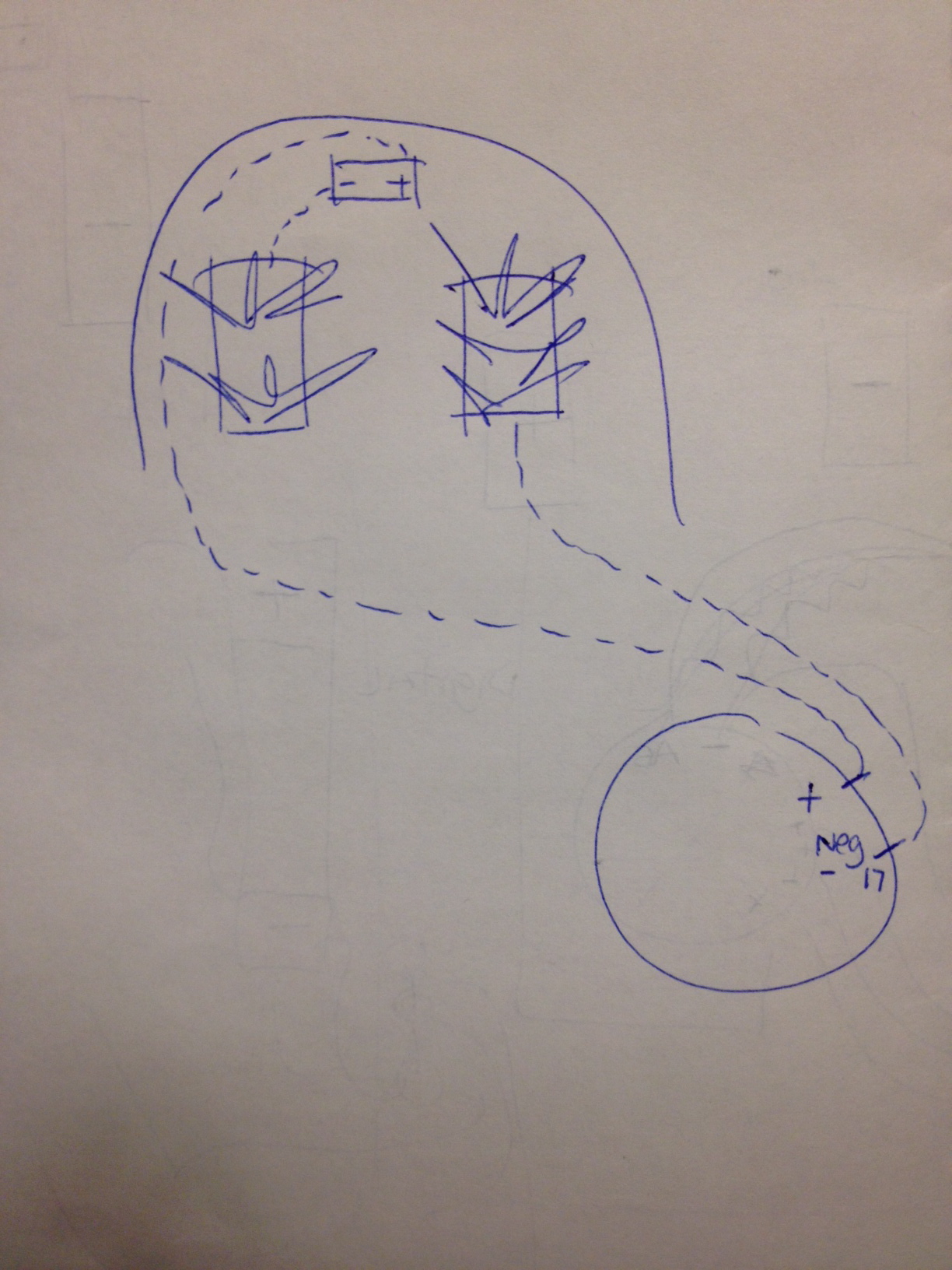
Here is my plan for the circuitry for my puppet (while laid flat):
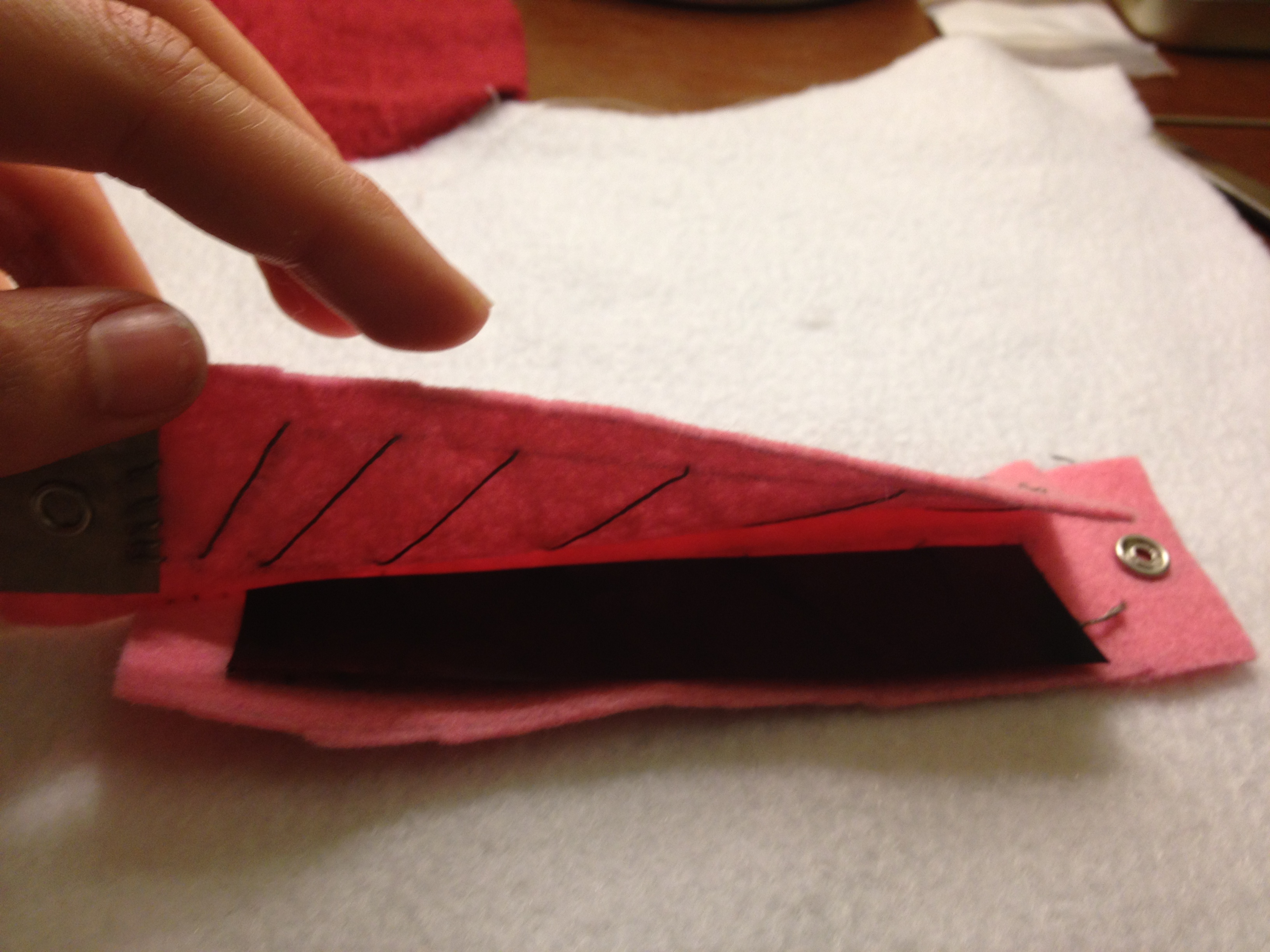
After I created the bend sensor, I made sure to measure its resting resistance using a multimeter to make sure that the resistance would decrease when I bent the sensor. At first, my measurements did not return a very high resting resistance so I added an additional piece of velostat so that the sensor would be less sensitive and return a higher range of resistances when bent.

As I sewed the circuits on the felt, I made sure to measure for continuity as I went along to make sure everything was connected before I got too far. I also wrote a few test programs in Arduino to test out the connections to LED lights.
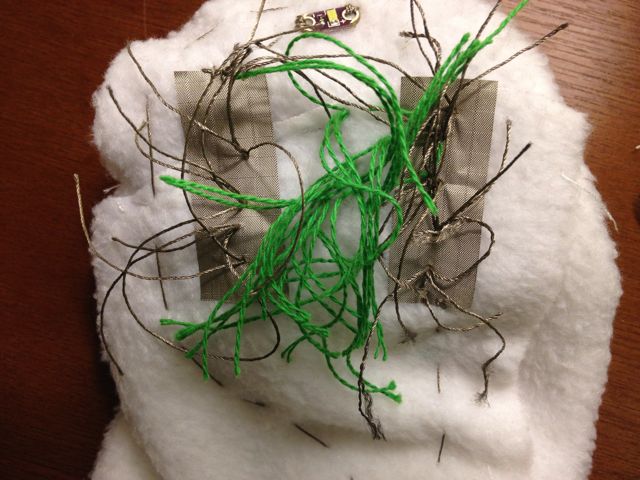
I sewed all the circuits in place and this is what it looked like before I assembled the puppet.


I then assembled the puppet and added the hair with the stroke sensor. Since this sensor would be digital I had to make sure that it was assigned digital pins on the LilyPad. I also had to create a “ground pin” in my program since I could not reach the Negative pin without crossing paths with another circuit.
I finally then programmed the LED lights in Arduino so that when the mouth is wide open, the LEDs light up in a “chasing” pattern. When the mouth is half way open, the lights slow down, and when it is closed, the lights turn off.
When you stroke the hair on the puppet, the LED on its head lights up when the conductive threads touch each other.
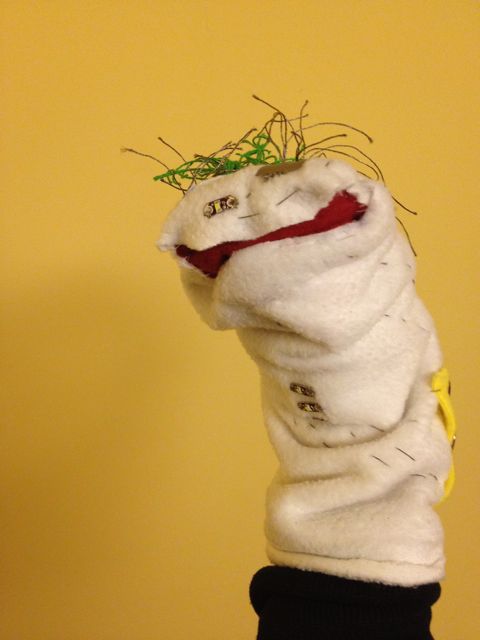
Here is my finished product and accompanying video:

Measurements: (Note: my calculated measurements did not seem to line up exactly but this could be because the resistance of the resting position of the bend sensor was taken when it was outside of the puppet, but voltage was measured while inside of the puppet. The curvature of the mouth most likely made it so that the resting resistance was slightly less when inside the puppet, thus throwing off my predictions).
Measured:
Calculated:
Measured: